ASW (anti submarine warfare) is the discipline where, a surface ship, want to find enemy submarines at as great a distance as possible, and preferably before the submarine can fire torpedoes at your own ships. If the submarine's torpedo has an effective range of e.g. 20 nmil, then you must be able to detect the submarine at a greater distance. This can only be done if you use ( Active Towed Array Sonar ) . An effective active sonar is lowered into the water, where it emits some very powerful sound pulses, which are dispersed in the water. If the sound wave meets a submarine, some of these waves are reflected back. It is in exactly the same way that a bat catches its prey. In order to be able to receive the weak sound waves that are reflected from the submarine, a long series of hydrophones are used which are lowered into the water, preferably 400 to 1000 meters after the ship, to reduce the propeller noise that the ship itself generates. (TAS) Towed Array Sonar. A TAS typically consists of 60 to 120 hydrophones, which hang like beads on a string. By calculate all the signals from all hydrophones, however, it is easier to distinguish between the reflected signal from the submarine and the background noise. (it's again the same way the bat does, it only has two ears)
Of course, the submarine designers try to make the submarine as invisible as possible. The entire Submarine is therefore typically coated with a thick layer of Polyurethane, to absorb the sonar sound instead of reflecting the sound. How good the submarine is at absorbing the sound / reflecting is called (TS = target strength) The lower the TS, the better the submarine is to sneak past unhindered, in the same way as a "stealth plane" is very difficult to detect with radar.
In the F341 model:
The model F341 has a Hull mounted sonar and a TAS Towed Array Sonar system.
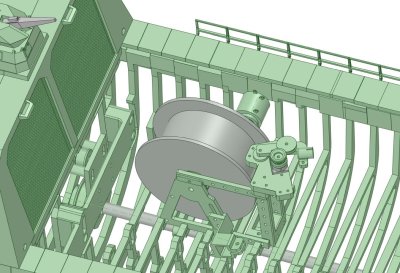
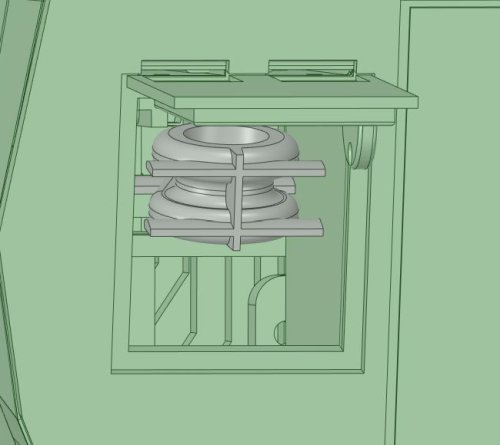
Design of the hull mounted sonar
The Sonar is a 344kHz piezoelectric (PZT) disc element with a diameter of 27mm (equal to 2m if 1:1)
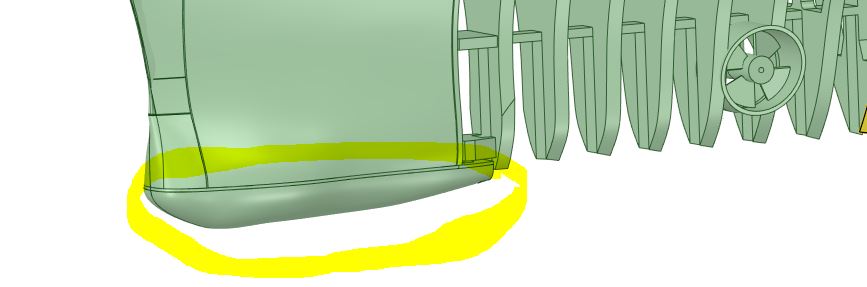 |
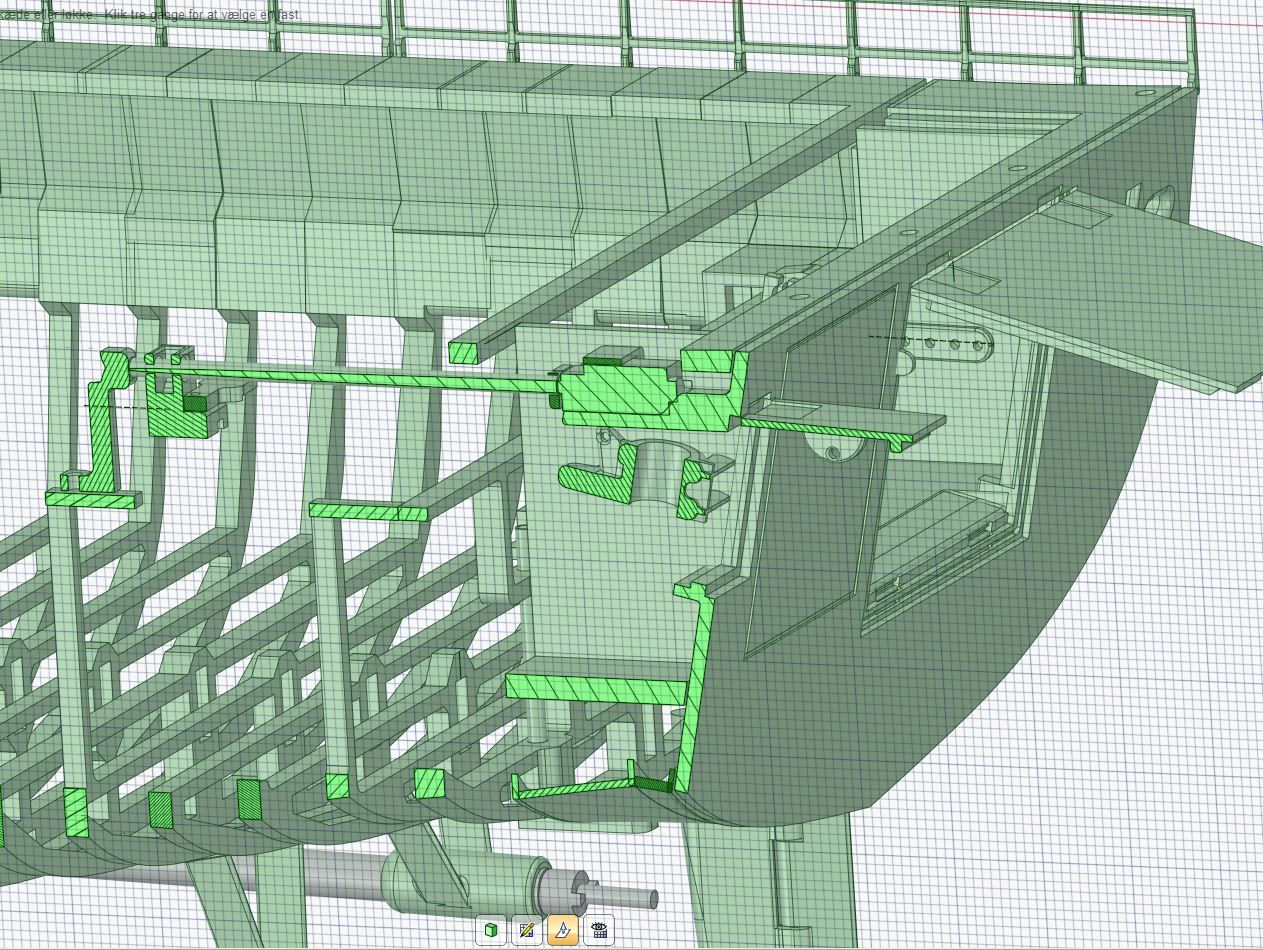
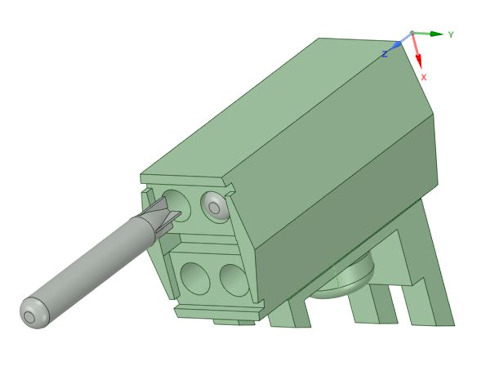
The Hull mounted Sonar is placed below the keel, for optimal visibility in all directions. |
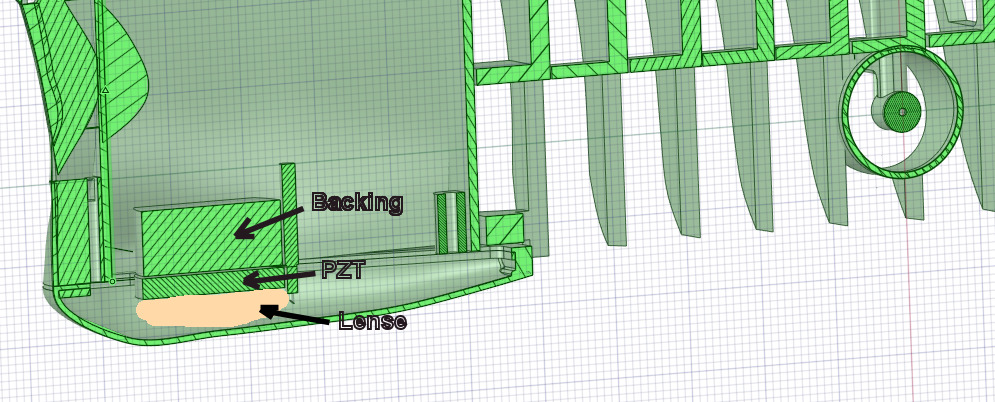 |
The sonar is designed with an acoustic
front “lens” and a backing material made of a combination of
tungsten powder and epoxy. The backing layer closed to the PZT
is heavy density, to match the PZT acoustic impedance, and by
gradually reducing the amount of tungsten power, changing the
density. The result is a well damped transducer with a good
transient response. (It may sound easy to make at home on the
desk, it is not and it sucks, and a lot of epoxy and power is
wasted because I only produced a single piece) The Sonar can be powered by a 50W amplifier and controlled by the 1GHz raspberry pi. The main processor. |
|
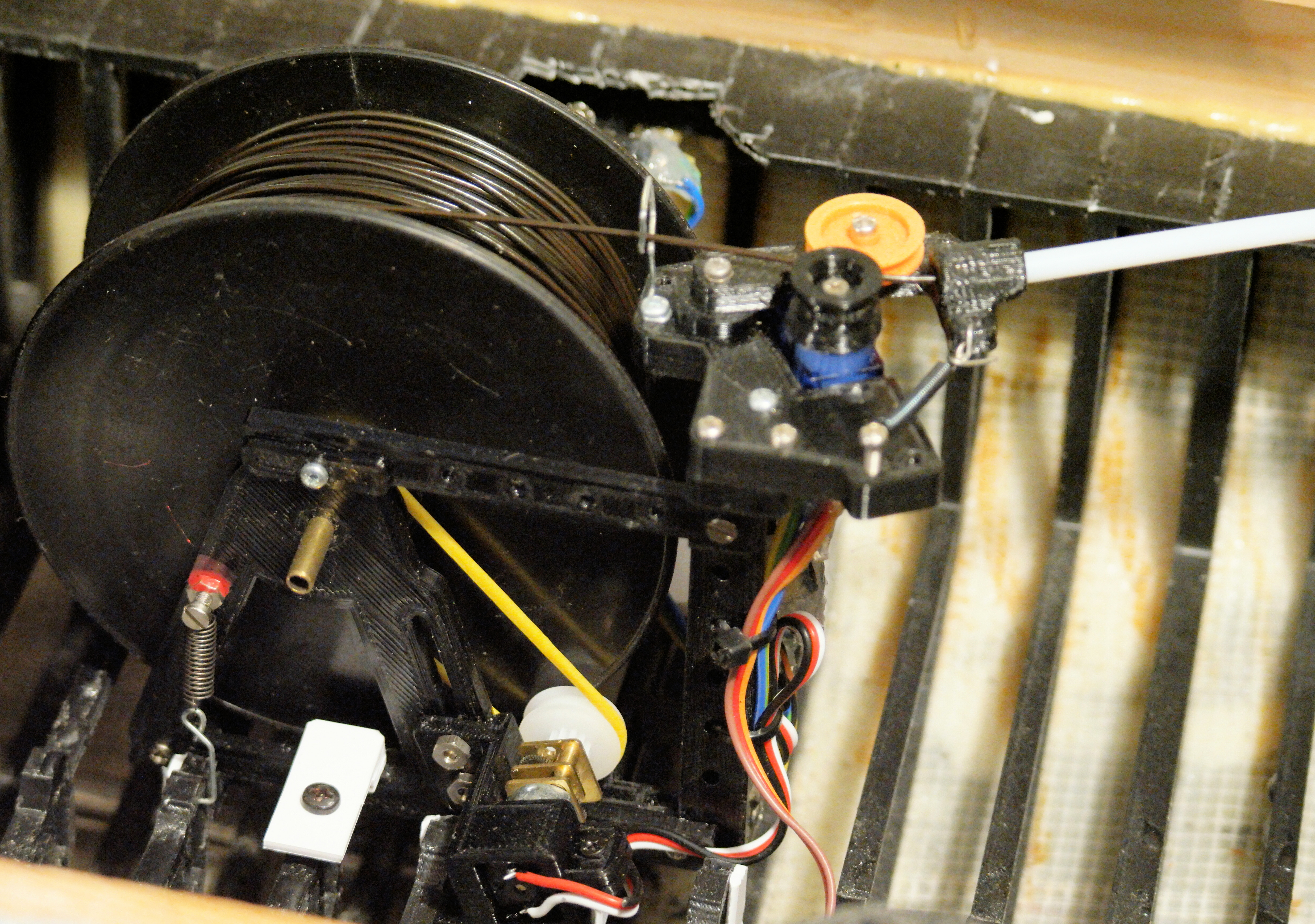
The TAS Towed Array Sonar and ATAS Active Towed Array Sonar design The TAS is design to reach a depth of a ship length (200cm) at a speed of 2 knots. A real life TAS: A hydrophone array is made up of a large number of hydrophones placed in known locations and towed in a horizontal line behind a boat or ship. Sound arriving at the array from a distant source, such as a submarine, will reach each hydrophone at slightly different times, depending on the direction from which the sound is coming. Using this information from all the hydrophones in the array, the direction from which the sound is coming can be pinpointed. If the background noise is uncorrelated, then noise can be reduced by the square root of the number of hydrophones. An array with 100 hydrophones can therefore listen / find noise sources that are (√100) 10 times below the individual hydrophone noise floor. In the model, TAS is implemented with a sinking class 10 fly-line. If you use a "sink tip" line, it places itself flat in the water at a nice depth a few meters behind the ship, it is also so rigid that it can be wound in and out completely automatically without any problems.
|